Operation Deadhorse – Part 2
LoRa “Real World” Test From Random Positions Around “Town”

After having some successful range tests with the T-Beam LoRa Meshtastic radios we decided to attempt a “real world” test of moving nodes to see if we could 1. Get reliable communications and 2. get a radio transmission to pass through a node where it acts as a repeater. We have some good and less than good results to share below.
Testing Methods, Parameters and Equipment:
Three Lilygo T-Beam with stock antennas an installed in 3D printed case
Each node was placed on the front dashboard of three independent vehicles, all at approximately the same height from the road surface, inside the truck and simply left with a vertical oriented antenna.
While preforming regularly scheduled work we decided to try and send p osition numbers corresponding to locations on our map and determine how many and, what communications were received from each radio.
osition numbers corresponding to locations on our map and determine how many and, what communications were received from each radio.
 osition numbers corresponding to locations on our map and determine how many and, what communications were received from each radio.
osition numbers corresponding to locations on our map and determine how many and, what communications were received from each radio.Every 10 minuets we would send out a position number to the other radios and we would move about our tasks and, then send another signal when the 10 minuet timer went off and, we were at a different position number around town.
Cell phone signal and wi-fi was turned off on each device connected to a LoRa radio to verify no signals were being sent via MQTT.
Two Iphones and one Android phone were used in this test.
Environmental Parameters:
The location of this test was preformed in Deadhorse Alaska. There are various industrial buildings spread out in the town.
The town is tree-less and flat with a max building height of 4 stories.
Current temp of 17F with good visibility out to 10 miles and Easterly wind at 2Mph or less
I did not check the KP index for this day.
Testing and Results: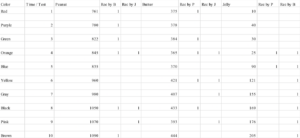

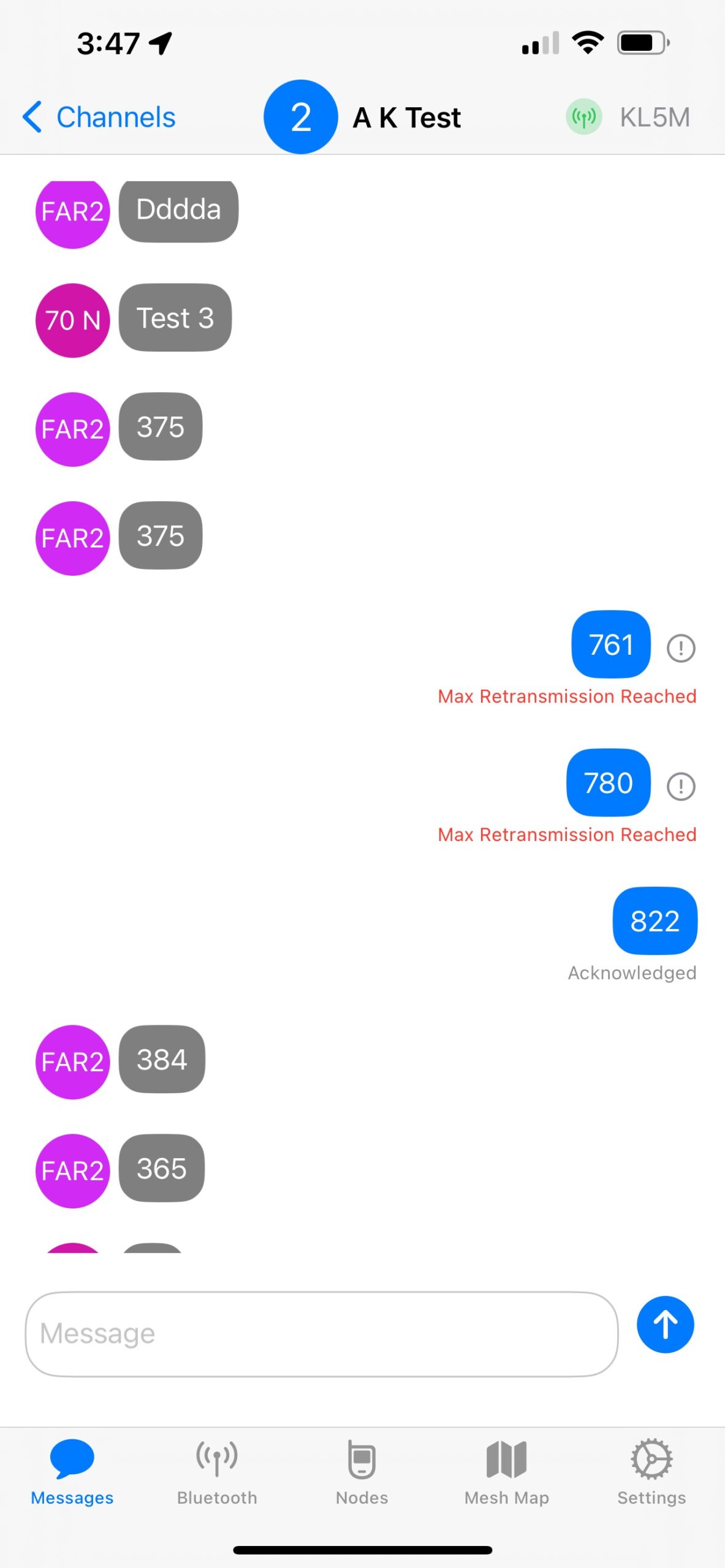
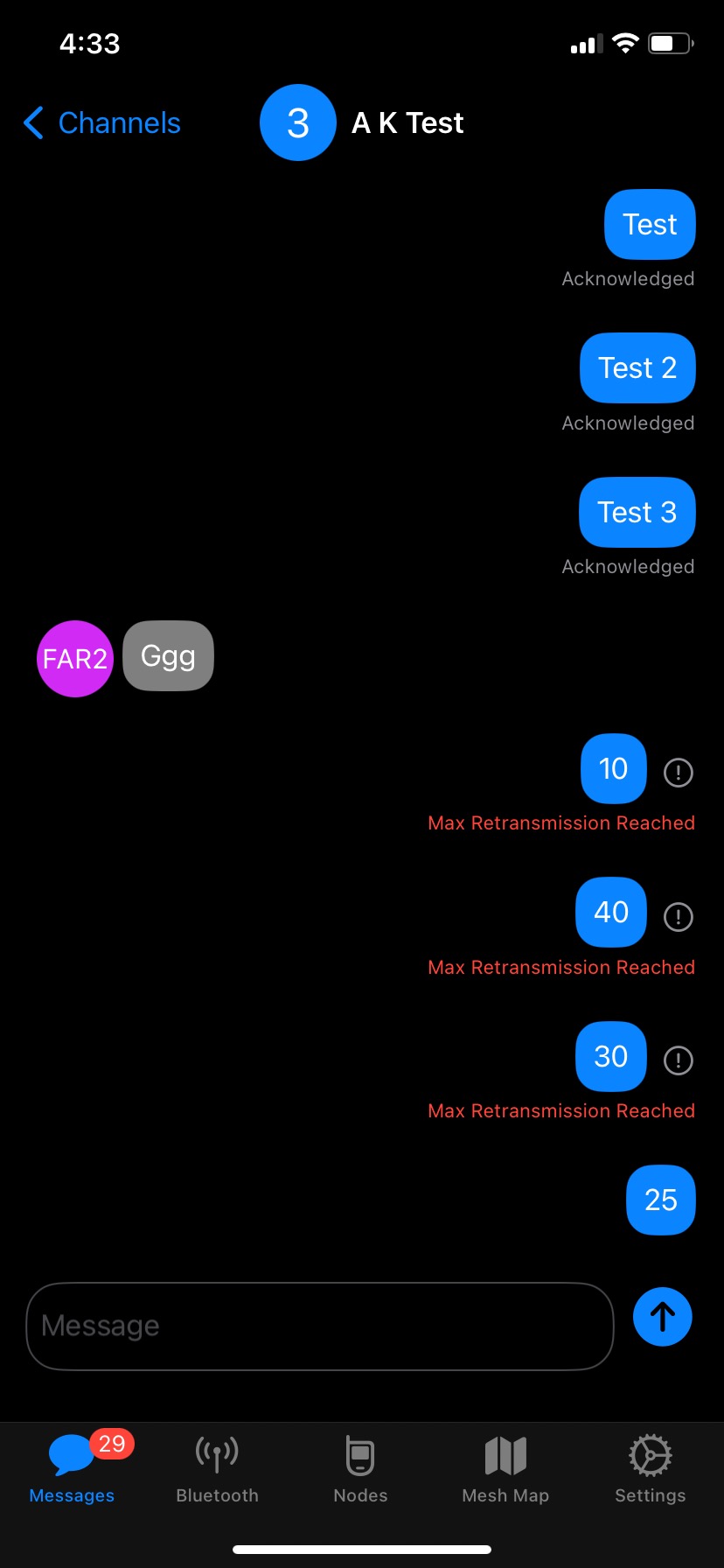
A total of 10 signals were sent by all three participants. Out of 30 signals sent for this test 26 signals were received by at least one radio. 7 signals were not received at all by any radios. least one radio
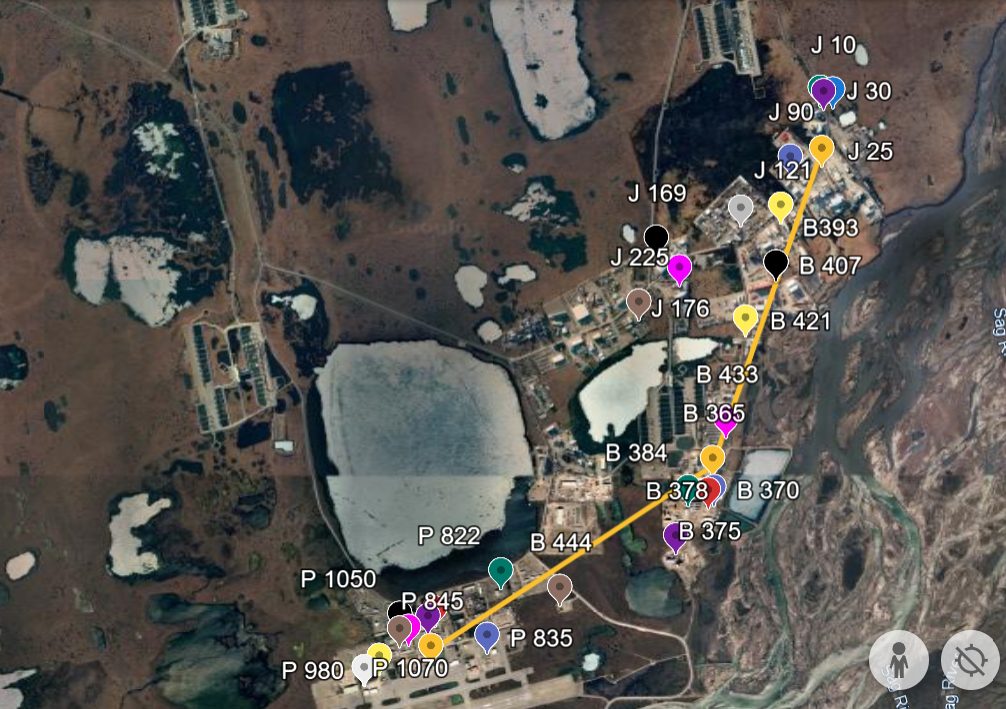
See Figure 1 below
Note that what was messaged (i.e. location numbers) are not relevant to the reader. These were used by me to identify where each node was approximately on the map when the
There was one assumed broadcast and repeat function that we believe was preformed successfully (Test 4 in Orange) where the middle node re-transmitted the signal to the farthest node See Table 2 Below and Map above
The average distance that the radios were apart was about 1.2 miles during this test.
Summarized Conclusions:
We feel that the radio units being inside the vehicles greatly reduced the ability to transmit/receive the signals and, if this test were preformed in a similar fashion to our long distance tests over 98% of the signals would have been received from either a direct communication or, a rebroadcast from a central radio.
While we did get some decent results and the radios do work reliably, their range is greatly diminished by obstructions i.e. windshields, the cab of the truck and the direction the truck happened to be pointing in when we sent/ received signals etc… On our next test and in good weather we will try mounting the radio antennas to the top of the trucks to repeat this test.
We suspect that test 4 was a successful test where the middle node was able to receive and re-transmit to the two farthest in distance radios because, neither of the two far nodes were receiving each others communication until this test and then, later on when the two farthest nodes were closer together.
Note also that, just because a message appears like “message received” or “max retransmission reached” does not necessarily mean that the message did or did not get there. I found my friends radio often displayed “max retransmission reached” and yet I was able to get his message. So, this is just an FYI that the success / failure of a message is not always correct.
The radios seem to work very reliably with antennas that are un-obstructed. The signals also seem adept at getting around physical objects such as buildings but, not so good at getting in or out of an enclosed vehicle. We hope to preform more tests in the near future and look forward to sharing our results.