
Tale of the T-Beams
LoRa Range Test in the Open Tundra
KK7HMX / KL5MU
Deadhorse is an unincorporated community located within the CDP of Prudhoe Bay in North Slope Borough, Alaska, United States, along the North Slope near the Arctic Ocean. The town consists mainly of facilities for the workers and companies that operate at the nearby Prudhoe Bay Oil Field.
With all the questions about the range of various LoRa devices we have tried to get some tangible and semi-scientific results in an ideal baseline terrain. After day one of doing some preliminary testing with some satisfactory results we devised a way to test both the range and repeater function of three identical Lilygo T-Beam devices.
Testing Methods and Parameters and Equipment:

Three Lilygo T-Beam with Stock antennas
These nodes were all protected in 3D printed cases
The nodes were wrapped in paper bags then, plastic protective bags to help protect them from snow and condensation.
Two of the nodes were then taped to wooden stakes and vertically mounted in a truck bed at approximately 11′ above ground level.
The 3rd node was also mounted to a slightly shorter wooden stake and used as a repeater to communicate between the 1st and the 2nd node.
Cell Phone signal and wi-fi was turned off on each phone connected to a LoRa device to prevent MQTT transmit.
Two Android cell phones and one IPhone were then only connected via blue-tooth and the Meshtastic App.
Communications were tested at each mile clocked on the reset odometer with a return confirmation that the mile mark was received.
Environmental Parameters:

The location of these tests were conducted on the Dalton Highway in North Alaska at an approximate latitude of 70N.
This is a very flat and tree-less terrain with some slight variation in topography and elevation and nearly a straight road to obtain test distance.
Current test temperature of 18F with moderate visibility out to about 3/4 mile and, with light blowing snow. Easterly wind at approximately 8mph.
The Kp index in the time frame of this test was about 3Kp around 12pm.
Testing and Results:

On the first day of this test we had a max range of about 9 miles. We simply had the nodes placed on the dash of the waiting truck facing the driving truck and, in the case of the driving vehicle facing out the rear window behind the rear seat. We obtained a max range of 9 miles and communications were spotty at this distance. There were many issues with this first test in the way it was conducted but, it was a good baseline to get an idea of how far our units could reliably send/receive signals. We were not testing repeater function. We only tested a point to point distance test on this day.
On our second day of tests we decided to conduct two tests at once. The first test would be a point to point node test with an increase and, standardization in antenna mounting height. The second test would be to drop a node between the two primary communicating T-Beams to verify that it would preform repeater function and continue our distance test with a repeater node placed. The repeater node was placed as close as possible to the max distance we achieved point to point.
For this test we mounted the two primary nodes at 11 feet above ground level (road surface) to a wooden stake strapped in a vertical position above the roof of the truck.
The node intended as a repeater was also placed on a wooden stake and this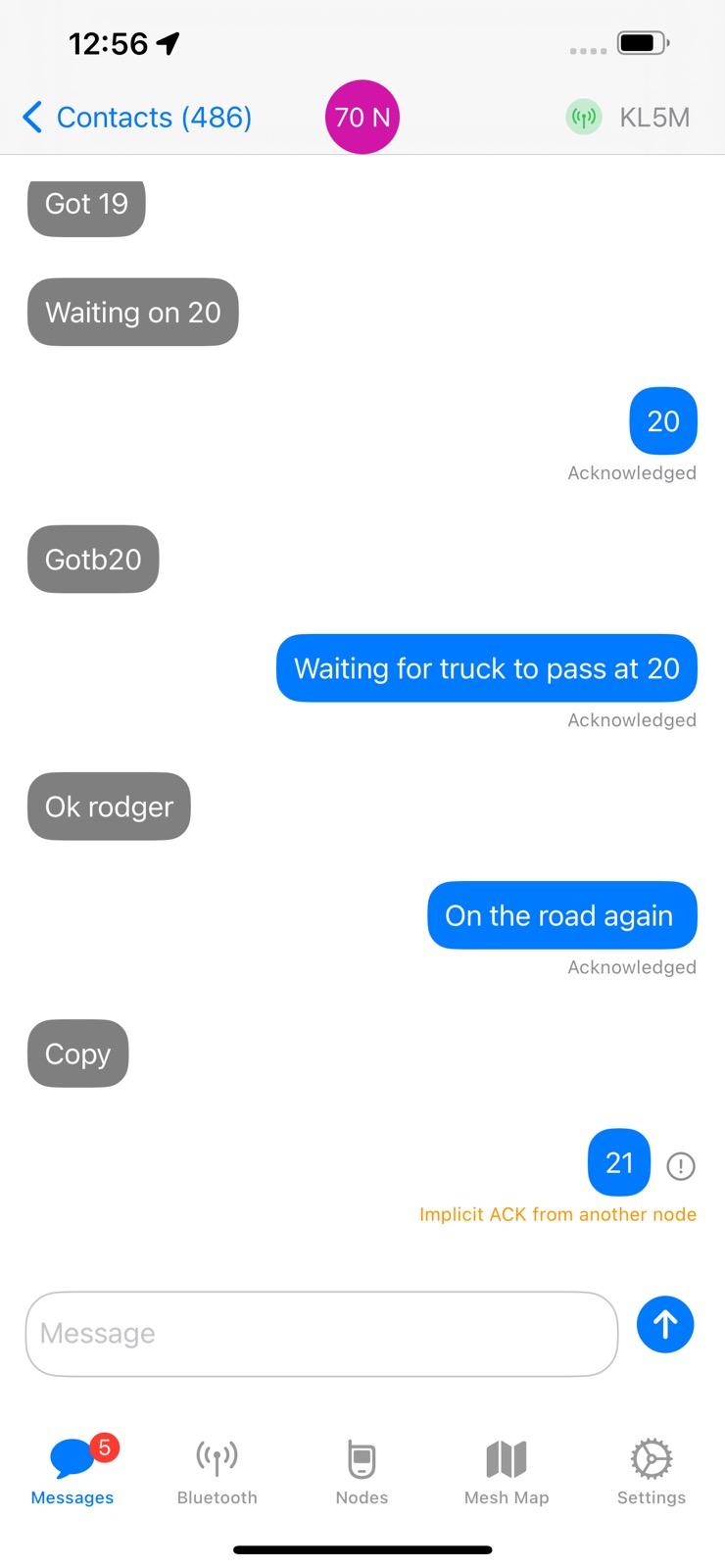 would be mounted to a road sign or mile marker. The node was placed in the back of the driving truck for deployment at the edge of the radio’s range and the cell phone it was connected to remained in the stationary truck just to help verify none of these communications were coming through the cell phone network and to leave the node to function independently as designed.
would be mounted to a road sign or mile marker. The node was placed in the back of the driving truck for deployment at the edge of the radio’s range and the cell phone it was connected to remained in the stationary truck just to help verify none of these communications were coming through the cell phone network and to leave the node to function independently as designed.
On our second range test the driving vehicle go to about 13 to 14 miles away from the parked truck. Communications were spotty and unreliable at this distance. Both of us got failed messages. The driving truck then returned to 11.7 miles where reliable coms between our two units was again established and, the repeater node was strapped to a sign at approximately 9 feet above the road surface.
The Driving truck continued on away from the parked truck and placed repeater node left at the 11.7 mark. Communications worked flawlessly until he got about 9.3 miles away from the repeater where, communications were spotty and then dropped off completely past that distance. So, The driving truck was 9.3 miles away from the repeater and 21 miles away from the stationary truck.
Summarized Conclusions:

On open, flat and tree-less ground these Lilygo T-Beam radios with stock antennas are capable of transmitting close to 10 miles as reliable max range estimate with MQTT disabled. We proved this to ourselves with a quick test out to 9mi and, a test with elevated radios at 11 feet having reliable point to point communications at 11.7 miles.
A node placed as a simple repeater device effectively preformed its task with no apparent communications issues passing communications between the other two test nodes.
No Looped messages were received by either node and, we believe looped messages are a function of the MQTT server or some other problem but, this issue does not show up when using the radios w/o MQTT.
We plan on conducting more tests to verify if weather affects range and, what better upgraded antennas will do to increase the range for these radios.
Ideas for other tests and feedback is appreciated.
KK7HMX